жңҖиҝ‘д№°дәҶеҮ дёӘNRF24L01жЁЎеқ—з”ЁжқҘеҒҡж— зәҝйҖҡи®Ҝ,иҖҢжҲ‘жүӢдёӯжӯЈеҘҪжңүдёӨдёӘж ‘иҺ“жҙҫе’ҢдёҖдёӘbeaglebone balck,е°ұжү“з®—дҪҝз”Ёnrf24l01жқҘеҒҡиҝҷдёүдёӘи®ҫеӨҮзҡ„йҖҡи®Ҝ.еҸҜд»ҘзҺ©зҡ„иҠұж ·еҫҲеӨҡ,NRF24L01еҹәдәҺSPIжҺҘеҸЈ,жҷ®йҖҡзҡ„еҚ•зүҮжңәе°ұеҸҜд»ҘдҪҝз”Ё,жүҖд»ҘеҸҜд»ҘеҫҲз®ҖеҚ•зҡ„е®һзҺ°arduinoе’Ңж ‘иҺ“жҙҫзӯүзҡ„ж— зәҝйҖҡи®Ҝ.NRF24L01жҳҜеҹәдәҺZigbeeйҖҡи®ҜеҚҸи®®зҡ„.иҝҷйҮҢд»ҘдёҖеҸ°ж ‘иҺ“жҙҫдёәдё»жңә,дёҖеҸ°ж ‘иҺ“жҙҫдёәд»Һжңә,дёҖеҸ°beagleboneдёәд»Һжңә,е®һзҺ°дёүеҸ°жңәеҷЁзҡ„з»„зҪ‘йҖҡи®Ҝ.
дёӘдәәеҺҹеҲӣ,зүҲжқғжүҖжңү,иҪ¬иҪҪиҜ·жіЁжҳҺеҺҹж–ҮеҮәеӨ„,并дҝқз•ҷеҺҹж–Үй“ҫжҺҘ:
дёҖ ж ‘иҺ“жҙҫе’Ңbeaglebone blackе’ҢNRF24L01зҡ„иҝһзәҝ
NRF24l01жҳҜеҹәдәҺSPIжҺҘеҸЈзҡ„:
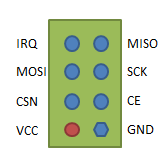
дёҺж ‘иҺ“жҙҫзҡ„иҝһзәҝ:
NRF24L01 => ж ‘иҺ“жҙҫ
GNDВ В В В В В В В В =>В В GND
VCCВ В В В В В В В В =>В В В 3.3V
CEВ В В В В В В В В В =>В В GPIO25 еҚі22з®Ўи„ҡ
CSNВ В В В В В В В =>В В CE0(GPIO8) еҚі 24з®Ўи„ҡ
SCKВ В В В В В В В =>В В SCLK(GPIO11)еҚі23з®Ўи„ҡ
MOSIВ В В В В В =>В В MOSI(GPIO10)еҚі19з®Ўи„ҡ
MISOВ В В В В В =>В В MISO(GPIO9)еҚі21з®Ўи„ҡ
IRQВ В В В В В В В В =>В В GPIO18еҚі12з®Ўи„ҡ
дёӨдёӘж ‘иҺ“жҙҫе’ҢNRF24L01зҡ„иҝһзәҝжҳҜдёҖж ·зҡ„
Beaglebone blackдёҺNRF24L01зҡ„иҝһзәҝ:
NRF24L01 => beaglebone black
GNDВ В В В В В В В В =>В В GND
VCCВ В В В В В В В В =>В В В 3.3V
CEВ В В В В В В В В В =>В В GPIO_48 (P9_15)
CSNВ В В В В В В В =>В В SPI0_CS0(P9_17)
SCKВ В В В В В В В =>В В SPI0_SCLK(P9_22)
MOSIВ В В В В В =>В В SPI0_D1(P9_18)
MISOВ В В В В В =>В В SPI0_D0(P9_21)
IRQВ В В В В В В В В =>В В GPIO_51(P9_16)
дәҢ ж ‘иҺ“жҙҫе®үиЈ…NRF24L01зҡ„pythonеә“
йңҖиҰҒе…Ҳе®үиЈ…ж ‘иҺ“жҙҫдёҠзҡ„gpio pythonеә“,жІЎжңүиЈ…зҡ„,еҸҜд»Ҙе…ҲзңӢжҲ‘иҝҷзҜҮеҚҡе®ў:
ж ‘иҺ“жҙҫraspberryдҪҝз”Ёpythonе®һзҺ°GPIOиҫ“е…Ҙиҫ“еҮә-жҢүй”®LED
NRF24L01 иҝҷйҮҢеҸӮиҖғ Learn from flyдёҠзҡ„ж–Үз« :
git clone https://github.com/riyas-org/nrf24pihub cd nrf24pihub cd python-spi sudo python setup.py install cd ../ В В В
иҝҳйңҖиҰҒжү“ејҖж ‘иҺ“жҙҫдёҠзҡ„SPIеҸЈ:
vi /etc/modprobe.d/raspi-blacklist.conf #blacklist spi-bcm2708 пјғдҪҝз”Ёдә•еҸ·жіЁйҮҠжҺүиҝҷиЎҢ blacklist i2c-bcm2708В #еҰӮжһңиҰҒдҪҝз”Ёi2cе°ұжіЁйҮҠжҺүиҝҷиЎҢ
йҮҚеҗҜ.дјҡеңЁ/devйҮҢйқўеӨҡеҮәдёӨдёӘж–Ү件:spidev0.0,spidev0.1
дёү Beaglebone Blackе®үиЈ…NRF24L01зҡ„pythonеә“
йңҖиҰҒе…Ҳе®үиЈ…Adafruit_GPIOеә“:
git clone git://github.com/adafruit/adafruit-beaglebone-io-python.git /usr/bin/ntpdate -b -s -u pool.ntp.org opkg update && opkg install python-distutils cd adafruit-beaglebone-io-python python setup.py install В В В
е®үиЈ…NRF24L01еә“,дҪҝз”Ёpynrf24:
git clone https://github.com/jpbarraca/pynrf24 cd pynrf24 python setup.py install
жү“ејҖSPIж”ҜжҢҒ:
з”Ёж–Үжң¬зј–иҫ‘еҷЁжү“ејҖuEnv.txt
еңЁйҮҢйқўжңҖеҗҺдёҖиЎҢеҠ е…ҘдёӢйқўзҡ„иҜӯеҸҘпјҡoptargs=capemgr.enable_partno=BB-SPIDEV0
йҮҚеҗҜ.дјҡеңЁ/devйҮҢйқўеӨҡеҮәдёӨдёӘж–Ү件:spidev1.0,spidev1.1
еӣӣ ж ‘иҺ“жҙҫдё»жңәзЁӢеәҸ:
master_receive.py:
from nrf24 import NRF24 import time from time import gmtime, strftime #и®ҫе®ҡд»Һжңәзҡ„еҸ‘йҖҒең°еқҖpipes[0],pipes[1],жң¬жңәзҡ„еҸ‘йҖҒpipes[0] pipes = [[0x10, 0x10, 0x10, 0x10, 0x20], [0x10, 0x10, 0x10, 0x10, 0x22]] radio = NRF24() radio.begin(0, 0,25,18) #set gpio 25 as CE pin,gpio 18 as IRQ pin radio.setRetries(15,15) radio.setPayloadSize(32) radio.setChannel(0x4c) radio.setDataRate(NRF24.BR_250KBPS) radio.setPALevel(NRF24.PA_MAX) radio.setAutoAck(1) radio.openWritingPipe(pipes[0]) radio.openReadingPipe(1, pipes[1]) radio.startListening() radio.stopListening() radio.printDetails() radio.startListening() while True: В В В pipe = [0] #pipeдёәжҺҘ收еҲ°зҡ„дҝЎжҒҜзҡ„д»Һжңәд»Һжңәиә«д»Ҫж ҮиҜҶ В В В while not radio.available(pipe, True): В В В В В В В time.sleep(100/1000000.0) В В В recv_buffer = [] В В В radio.read(recv_buffer) В В В out = ''.join(chr(i) for i in recv_buffer) В В В print "Message from "+str(pipe[0])+":"+out
дә” ж ‘иҺ“жҙҫд»ҺжңәзЁӢеәҸ
raspberry_send.py
from nrf24 import NRF24 import time from time import gmtime, strftime pipes = [[0x10, 0x10, 0x10, 0x10, 0x20], [0x10, 0x10, 0x10, 0x10, 0x12]] radio = NRF24() radio.begin(0, 0,25,18) #set gpio 25 as CE pin radio.setRetries(15,15) radio.setPayloadSize(32) radio.setChannel(0x4c) radio.setDataRate(NRF24.BR_250KBPS) radio.setPALevel(NRF24.PA_MAX) radio.setAutoAck(1) radio.openWritingPipe(pipes[0]) radio.openReadingPipe(1, pipes[1]) radio.startListening() radio.stopListening() radio.printDetails() radio.startListening() count = 1 while True: В В В pipe = [0] В В В send_data = "send count: "+str(count) В В В print "start send data..." В В В print "send data:"+str(count) В В В radio.stopListening() В В В ok = 0 В В В ok_true = 32 В В В while ok!=ok_true: В В В В В В В ok = radio.write(send_data) В В В time.sleep(2) В В В count = count + 1
е…ӯ beaglebone black д»ҺжңәеҸ‘йҖҒзЁӢеәҸ
beaglebone_send.py:
from nrf24 import NRF24 import time pipes = [[0x10, 0x10, 0x10, 0x10, 0x22], [0x10, 0x10, 0x10, 0x10, 0x11]] radio = NRF24() radio.begin(1, 0, "P9_15", "P9_16") #Set CE and IRQ pins radio.setRetries(15,15) radio.setPayloadSize(32) radio.setChannel(0x4c) radio.setDataRate(NRF24.BR_250KBPS) radio.setPALevel(NRF24.PA_MAX) radio.openWritingPipe(pipes[0]) radio.openReadingPipe(1, pipes[1]) radio.startListening() radio.stopListening() radio.printDetails() buf = ['P', 'I', 'N', 'G'] count = 1 while True: В В В send_data = "send:"+str(count) В В В print send_data В В В ok_true = 32 В В В while ok!=ok_true: В В В В В В В ok=radio.write(send_data) В В В print ok В В В time.sleep(2) В В В count = count+1
дёғ еҗҜеҠЁзЁӢеәҸжөӢиҜ•
ж ‘иҺ“жҙҫдё»жңә: sudo python master_receive.py
ж ‘иҺ“жҙҫд»Һжңә:sudo python raspberry_send.py
beagleboneд»Һжңә:sudo python beaglebone_send.py
收еҲ°зҡ„ж•°жҚ®:
